




Mechatronická laboratoř (MechLab) se zaměřuje na všechny podstatné aspekty mechatroniky, tj. modelování a simulace, identifikace systémů, programování, zpracování signálu, návrh embedded systémů a další. Používáme přitom moderní hardware společně se softwarovými nástroji pro modelování, simulaci a programování (MATLAB/Simulink, dSPACE, NI LabVIEW, Xilinx).
Umíme řešit úlohy kinematiky a dynamiky, navrhnout a vyrobit DPS či kompletní průmyslový datalogger, naprogramovat mikrokontrolér nebo FPGA. Naší silnou stránkou je právě schopnost realizovat komplexní projekt jako celek. Specializujeme se na rychlý návrh řídicích systémů (Rapid Control Prototyping) a HIL (hardware-in-the-loop simulace).
MechLab umožňuje studentům získat praktickou zkušenost s reálnými mechatronickými soustavami (hands-on). V rámci cvičení nebo při zpracovávání bakalářské a diplomové práce řídí studenti z počítače stejnosměrný motor, škrticí klapku osobního automobilu nebo model vrtulníku. Studenti získají cenné znalosti a zkušenosti, které teorie a simulace na počítači nepostihne.
Podílíme se na realizaci výzkumných projektů v oblasti modelování kinematiky a dynamiky, řízení nelineárních systémů s aplikacemi v automobilovém průmyslu, diagnostiky elektromechanických systémů, návrhu a realizace embedded systémů.
Zkušenosti získané při výzkumu a také výuce aplikujeme při realizaci zakázek pro průmyslové partnery. Spolupracujeme s firmami Škoda Auto, Robert Bosch, UNIS, ŽĎAS, Alucast, Honeywell. Vyrobili a dodali jsme několik různých typů unikátních laboratorních přístrojů pro testování výrobků a procesů, měření a datalogging.
Podívejte se na některé z našich realizovaných vzdělávacích a výzkumných projektů nebo výsledků spolupráce s průmyslovými partnery.

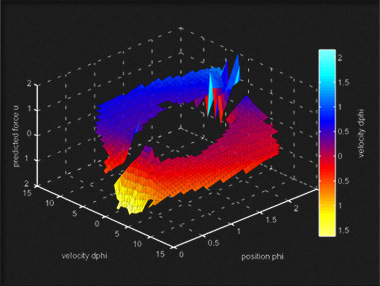
Balancující vozidlo je ideálním příkladem pro demonstraci řady principů Mechatroniky. Jde o kombinaci mechaniky, elektroniky a elektrického pohonu s počítačovým řízením. Výsledná funkcionalita zařízení je přitom umožněna “chytrým” zpracováním signálu a návrhem řídicího algoritmu.
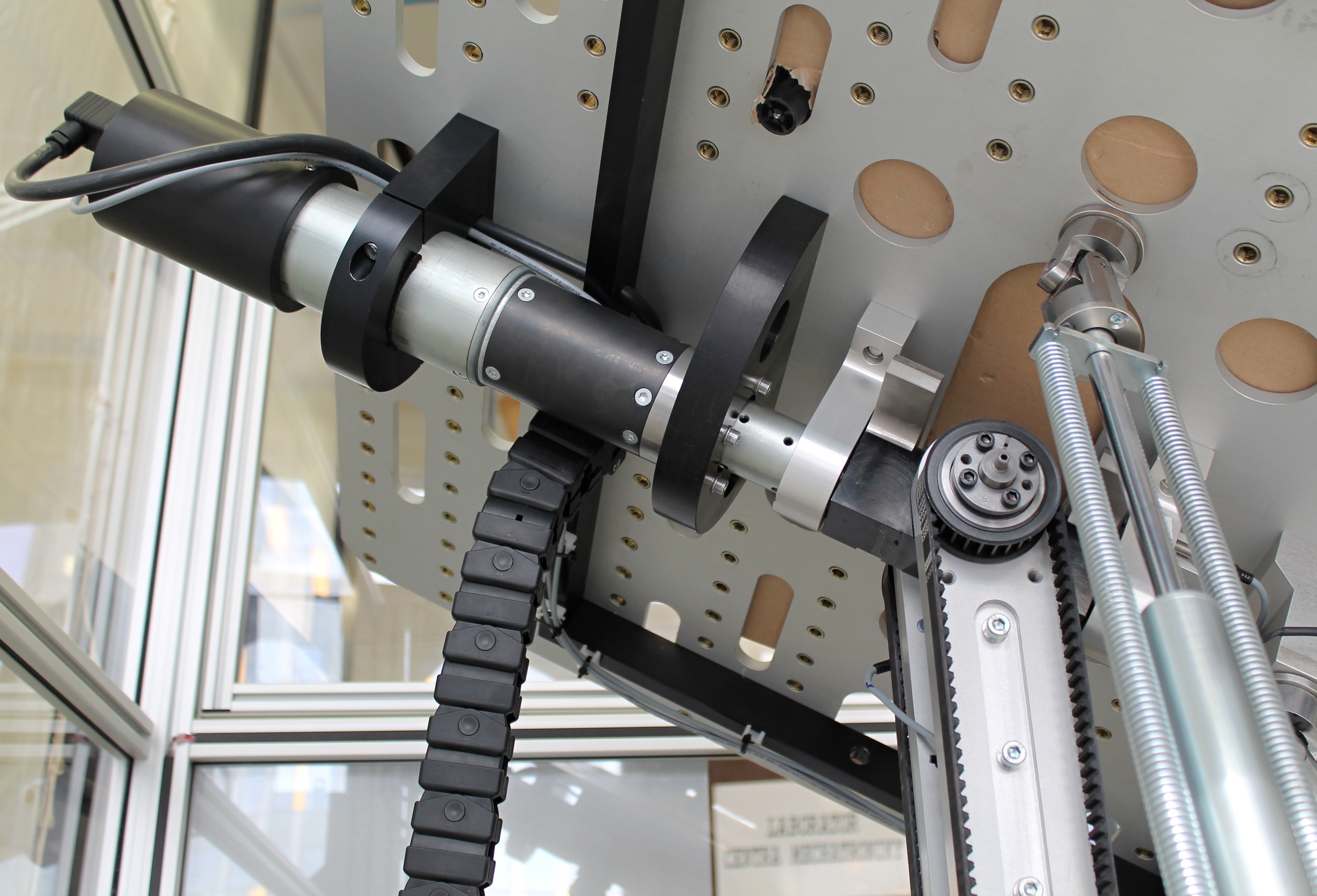
Zařízení schopné simulovat zrychlení téměř 7 ms-2 , což odpovídá zrychlení z 0-100 km/h za pouhé 4s. Simulace je realizována změnou směru vektoru působící tíhové síly na daném tělese náklonem testovaného objektu o hmotnosti až několik desítek kilogramů. Zařízení bylo kompletně vyvinuto v naší laboratoři pro firmu BOSCH v Českých Budějovicích a disponuje prohlášením o shodě se směrnicemi a normami EU.
Publikace popisuje základní metody řešení úloh kinematiky a dynamiky prostorových soustav tuhých těles (MBS) s důrazem na aplikaci na počítači. Teoretický výklad maticových metod a algoritmů je doplněn řadou řešených příkladů. Vydalo nakladatelství CERM v r. 2007, ilustracemi doplnil J. Plšek.

Obsah knihy vychází z několikaletých zkušeností s výukou modelování v Simulinku a SimMechanics. Zaměřuje se na teoretické základy, které jsou pro úspěšné zvládnutí SimMechanics podstatné, a následně na konkrétní problémy formou řešených úloh. Vyšlo v r. 2006 v nakladatelství BEN.

Prototyp zařízení slouží pro diagnostiku vstřikovací trysky pro naftový motor. Na základě měření napětí, proudu a vibrací na trysce je získána informace o době otevření a zavření trysky a další dynamické parametry soustavy. Prototyp byl vyvinut pro potřeby laboratoře kvality RBCB/QMM4 firmy Robert Bosch s.r.o., České Budějovice.

V naší laboratoři vznikl bezdrátový modul pro snímání vibrací kvůli požadavku firmy ZKL na dlouhodobý monitoring vibrací na klikové hřídeli velkých strojů. Zařízení je schopné měřit zrychlení v rozsazích 1-1000g a integrovaná baterie umožňuje provoz po dobu jednoho roku. Surový signál je přenášen ze zařízení do počítače, kde je možné jeho další zpracování v aplikaci vyvinuté v prostředí LabView.

Projekt ESPOSA je zaměřen na technologie turbínových motorů pro malá letadla do 19 cestujících. VUT zajišťuje v těsné spolupráci s firmou UNIS vývoj technologií a podporu v oblasti modelování, rychlého prototypování řídicích systémů, Hardware-In-the-Loop simulací a automatického generování kódu z prostředí simulačních nástrojů.